线性回归
线性回归是机器学习中最基础的预测模型之一,主要用于预测连续的数值型目标变量。
跟中学的二元一次方程类似,假设输入变量(自变量)和输出变量(因变量)之间存在线性关系。
线性回归模型试图找到一条直线,最好地描述自变量 X 和因变量 Y 之间的关系。这条直线的数学表达式为:
其中,是截距,是斜率,统称为模型参数;是误差项,代表模型未能解释的部分
回归问题解法
这里我们换一种更直观的方式来表示线性回归问题
假定每个样本有 个特征 ,采集到 个样本的这 个特征的值并标注其结果 :
假定结果与这 个特征之间都是线性关系:
换成矩阵形式:
对于每一个样本点,可以表示为:
假定误差 是独立同分布的,服从均值为 0,方差为某定值 的高斯分布
为什么使用高斯分布?
- 中心极限定理
- 想象一下,你在做一件事情,这件事的结果受到很多小因素的影响,比如打篮球时的风向、手的角度、力量的大小等等。单独看一个因素,它可能对结果的影响不大,而且这种影响可能是随机的。但当这些小因素叠加起来时,它们共同创造最终的结果
- 中心极限定理告诉我们,当有很多这样的小随机因素影响一个结果时,无论这些因素各自是什么分布(只要它们符合一些基本条件),它们的总和都会趋向于形成一个高斯分布。这就是为什么即使我们不知道误差的具体来源,我们仍然可以假设它们整体上呈正态分布
- 统计分析的简化:
- 在构建统计模型时,希望模型简洁且有强大的预测能力。如果假设误差项遵循高斯分布,就可以使用一些非常有效的统计工具,比如最小二乘法和最大似然估计,来找到模型参数
- 假设误差是高斯分布的,意味着误差是“公平”的——没有系统偏差,所有的偏差都是随机的。这使得模型的估计更加可靠,因为它不会系统地高估或低估真实值
- 在经典线性回归分析中,常常假设误差项 是独立同分布的,且服从均值为 0,方差为 的正态分布。这个假设(高斯白噪声假设)简化了模型的分析和参数的估计,特别是使用最小二乘法或最大似然估计时
根据高斯分布的概率密度函数:
可以得到:
因为样本的特征和结果已知,上述函数是关于 的函数,则可以得到关于 的似然函数:
对其求对数似然:
极大似然估值是要求 的最大值,令:
为什么这里要用 等价变化?
-
概念清晰:使用 使得模型的解释更加直观。可以更清楚地看到,损失函数是通过计算预测值 与实际值 之间的差的平方来定义
-
扩展性:采用这种形式,可以更容易地将线性模型扩展到非线性模型,例如在 Logistic 回归或神经网络中, 可能包括非线性变换
求 的最大值等价于求 的最小值,求 最小值就是使用最小二乘法( 即损失函数)
解析解
求 的最小值就是一个求极值的问题,即求 时 的值
将 个 维样本组成矩阵
- 的每一行对应一个样本,共 行
- 的每一列对应��样本的一个维度(特征),加上一个值恒为 1 的维度(截距),共 列
将损失函数 转化为:
对上式求 的偏导:
导数规则
- 导数 ,当 是对称矩阵
- 导数 ,当 是常数向量
令上式为 0,得到最终解:
这里 不一定可逆,可以加上 扰动( 是一个略大于 0 的实数)
是正定的,所以一定是可逆的
为什么加入扰动一定是正定?
首先来解释一下什么是正定矩阵:如果对于所有非零向量 ,都有 ,则这个对称矩阵 被称为正定矩阵。
特性:
- 对称性: 是一个对称矩阵,因为 。
- 半正定: 是半正定的,这是因为对于任何非零向量 ,。这表明 的所有特征值非负。
添加 之后
- 当我们在 中添加一个正数 乘以单位矩阵 ,即 ,我们实际上是在 的每个特征值上加上 。因为 的特征值都是1,所以 的特征值都是 。
- 即使 是奇异的或者有零特征值, 的加入使得每个原始特征值 变为 。因为 ,这确保了所有新的特征值都是正的。
保证正定和可逆性
- 正定:因为对于任意非零向量 ,都有 ,所以 是正定的。
- 可逆性:矩阵是正定的,则它没有零特征值,这意味着它是非奇异的,即可逆的。
加入扰动其实就是线性回归正则化的技术,特别是岭回归(Ridge Regression)的公式。这是一种处理特别是在存在多重共线性(自变量高度相关)时或为了防止过拟合而常用的技术
当 的行列式接近或等于零(即矩阵接近奇异或完全奇异),直接计算其逆会有问题,这通��常在特征数量多于样本数量或特征之间高度相关时发生。这会导致模型参数估计的不稳定性和大的方差。
为了克服这个问题,岭回归通过添加一个惩罚项 (其中 是一个正的常数, 是单位矩阵)到 中
-
惩罚项 :
- 惩罚系数 :这个系数控制了正则化的强度。 的值越大,对参数 的惩罚越大,使得模型参数的值变得更小,这通常会降低模型的复杂度,有助于防止过拟合。
- 单位矩阵 :添加到 的单位矩阵确保了正则化项只影响参数的估计值,而不改变其它统计性质。这样的修改提高了 的条件数,从而使得矩阵更容易求逆,增加了数值稳定性。
-
统计意义:
- 通过引入惩罚项,岭回归有效控制了模型参数的大小,有助于处理共线性问题,降低模型在新数据上的预测误差,特别是当原始特征矩阵 不适合直接求逆时。
-
实际应用:
- 在实际应用中,选择合适的 是关键,通常通过交叉验证等方法进行选择。
- 岭回归广泛用于包含大量预测变量的模型中,尤其是那些变量间存在复杂相关关系的情况。
梯度下降
对于损失函数 ,可以得出其为凸函数
为什么损失函数一定为凸函数?
在线性回归模型中,常用的损失函数是平方误差损失,其形式为:
可以写成以下形式:
展开后,得到:
其中,const 是一个不依赖于 的常数项。
-
矩阵 的性质: 是设计矩阵 的转置乘以 。这个矩阵是对称的,并且是半正定的。意味着对于任何非零向量 ,都有 。
-
半正定矩阵和凸函数:一个函数如果是形式为 的二次函数,其中 是半正定矩阵,则该函数是凸函数。在平方误差损失的情况下,矩阵 对应于 。由于 是半正定的,这保证了损失函数 是关于 的凸函数。
为什么形式为 的函数在 𝐴 为半正定矩阵时,是一个凸函数?
凸函数的定义:一个函数 是凸的,则对于所有 和所有 ,都满足:
二次函数的凸性
-
函数的梯度(一阶导数):
-
函数的海森矩阵(二阶导数):
海森矩阵 是衡量函数曲率的关键。如果海森矩阵是半正定的,那么该函数是凸函数。
半正定矩阵与凸性
-
半正定矩阵的特性: 半正定矩阵 的性质是:对于任何向量 ,都有 ,即函数 的值永远是非负的。
-
海森矩阵的半正定性: 在上述二次函数中,海森矩阵 。因为 是半正定的,乘以正标量 2 不改变其半正定性。因此, 也是半正定的。
-
凸函数的确定: 如果海森矩阵 是半正定的,根据凸分析理论,函数 是凸函数。这是因为函数的曲率(由海森矩阵确定)在整个定义域内都是非负的,满足凸函数的定义。
对于凸函数,可以用梯度下降算法来求机制,相当于不断重复下式:
损失函数:
对每一个 求偏导:
其中 ,换成矩阵形式:
得出梯度下降公式就是:
多项式扩展
在训练模型时,原始数据不都是线性关系,对于非线性关系的数据,就可以采用多项式扩展的方式来实现。
多项式扩展其实就是给原有的数据添加一些新的特征,这些新特征是原始特征的高次方或者不同特征之间的组合。通过这种方式,可以让简单的线性模型能够学习到数据中的非线性关系,从而提高模型的预测精度。
多项式扩展是一种提升模型能力的简单而有效的方法,尤其适用于处理那些原始特征与输出之间存在非线性关系的情况。通过这种方式,即使是简单的线性回归模型也能进行复杂的非线性数据拟合,但需要注意避免过拟合。
假如现在有一个实验,试图通过测量热水壶的电力消耗来预测它煮沸水的时间。如果仅使用电力消耗(瓦特数)作为特征,你可能会发现难以精确预测煮沸时间,因为实际上煮沸时间与电力消耗之间的关系可能不完全是直线(即线性)关系。
这时,多项式扩展就派上用场了。除了电力消耗,可以引入电力消耗的平方、立方等作为新的特征。这样,模型不仅考虑了电力消耗本身,还考虑了电力消耗的高次效应,可能更好地捕捉到煮沸时间的变化。
假设我们有以下简单的数据集:
| 电力消耗(瓦特) | 煮沸时间(分钟) |
|---|---|
| 1500 | 4 |
| 1000 | 6 |
| 2000 | 3 |
如果直接用电力消耗来预测煮沸时间,可能得到不够准确的结果。但如果引入电力消耗的平方作为第二个特征,那么模型就有可能更好地理解数据:
- 原始特征:电力消耗
- 新特征:电力消耗的平方
于是,特征就从单一的 扩展到了 和 。在实际应用中,可以使用机器学习中的工具来自动完成这种扩展,并用这些特征来训练我们的模型。
使用Python进行建模,可以用sklearn库中的PolynomialFeatures自动进行多项式扩展:
from sklearn.preprocessing import PolynomialFeatures
import numpy as np
# 创建数据:电力消耗
X = np.array([[1500], [1000], [2000]])
'''
用PolynomialFeatures来扩展特征
degree=2,扩展的阶数
interaction_only=False,是否只保留交互项
include_bias=True,是否需要偏置项
'''
poly = PolynomialFeatures(degree=2, interaction_only=True, include_bias=False)
X_poly = poly.fit_transform(X)
print(X_poly)
输出的 X_poly 将包含原始电力消耗及其平方值,可以直接用于模型训练。
过拟合与欠拟合
在机器学�习中,过拟合和欠拟合是两种常见的模型表现问题,它们反映了模型对训练数据和未见数据(如测试数据)的泛化能力。
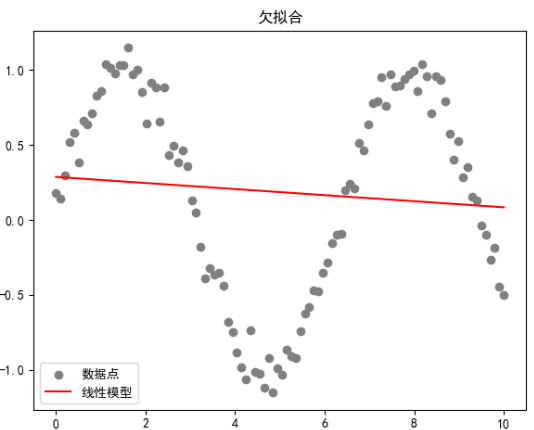
欠拟合(Underfitting)
当一个模型在训练数据上没有很好的表现,即模型过于简单,没有捕捉到数据的基本关系时,就会发生欠拟合。这通常是因为模型不够复杂,无法学习数据中的所有信号
表现:
- 模型在训练集和测试集上的表现都不好
- 模型过于简单,例如线性模型试图捕捉非线性关系
原因:
- 模型复杂度过低
- 特征量不足
- 过于简化的假设
解决方法:
- 增加更多特征
- 使用更复杂的模型
- 减少数据预处理中的简化
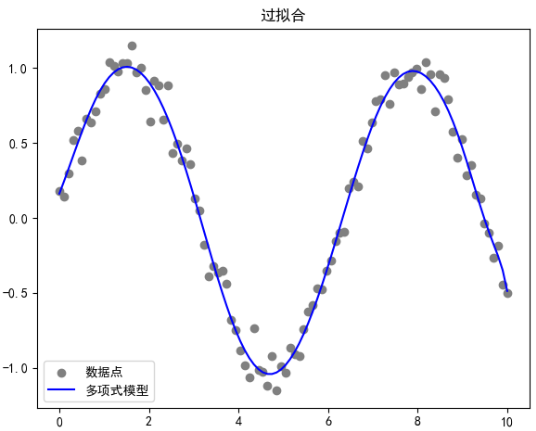
过拟合(Overfitting)
过拟合发生在模型在训练数据上表现得太好,以至于它学到了训练数据中的噪声而非潜在的数据分布。这种模型虽然在训练集上得分高,但是在新的或未见过的数据上表现差,因为它缺乏泛化能力
表现:
- 模型在训练集上表现出色,但在验证集或测试集上表现不佳
- 捕捉了数据中的随机噪声而非真正的输入与输出间的关系
原因:
- 模型复杂度过高
- 训练时间过长
- 训练数据量不足或包含噪声
解决方法:
- 简化模型,选择一个适当的模型复杂度
- 采用正则化技术(如L1、L2正则化)
- 使用更多的训练数据
- 采用交叉验证来调整模型参数
- 提前停止训练过程(例如,在验证误差开始增加时停止)
正则化
线性回归问题的损失函数后加上一项,称为正则化项:
通过添加正则化项来解决过拟合的问题就是正则化技术
L1正则化和L2正则化使用的优化算法是坐标下降(coordinate descent)
L1正则化
在L1正则化中,正则项通常形式如下:
L1正则化的回归也称为Lasso(Least Absolute Shrinkage and Selection Operator,最小绝对收缩选择算子)回归
L1正则化倾向于产生稀疏的权重矩阵,即很多权重参数会变为零。这种特性使得L1正则化成为一种自然的特征选择方法,因为它可以帮助模型仅保留最重要的特征。
import pandas as pd
from sklearn.linear_model import Lasso, LassoCV
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import PolynomialFeatures
# 加载数据
data = pd.read_csv('boston_housing.data', sep='\s+', header=None)
# 提取特征属性X和目标属性Y
X = data.iloc[:, :-1]
Y = data.iloc[:, -1]
# 将数据集划分为训练集和测试集
x_train, x_test, y_train, y_test = train_test_split(X, Y, test_size=0.33, random_state=10)
# 多项式特征扩展
poly = PolynomialFeatures(degree=2, interaction_only=True, include_bias=False)
x_train_poly = poly.fit_transform(x_train)
x_test_poly = poly.transform(x_test)
# 构建Lasso回归模型,设置正则化强度alpha
lasso = Lasso(alpha=0.1)
# 使用训练数据拟合模型
lasso.fit(x_train_poly, y_train)
# # 构建LassoCV回归模型,使用交叉验证选择最佳alpha
# lassoCV = LassoCV(alphas=[0.0001, 0.001, 0.01, 0.1, 1, 10, 20, 30, 40], cv=10)
# # 使��用训练数据拟合模型
# lassoCV.fit(x_train_poly, y_train)
# 对测试集进行预测
y_test_hat = lasso.predict(x_test_poly)
# 对训练集进行预测
y_train_hat = lasso.predict(x_train_poly)
# 打印模型的系数和截距
print("Lasso Regression:")
print(f"系数: {lasso.coef_}")
print(f"�截距: {lasso.intercept_}")
# 打印模型在训练集和测试集上的评分
print(f"训练集评分: {lasso.score(x_train_poly, y_train)}")
print(f"测试集评分: {lasso.score(x_test_poly, y_test)}")
L2正则化
在L2正则化中,正则项通常形式如下:
L2正则化的回归也称为岭回归(Ridge Regression)
L2正则化通过惩罚参数的平方和来工作,这导致参数值趋向于非常小的数,但通常不会完全为零。这有助于减少模型参数对训练数据中小波动的敏感性,从而提高模型的泛化能力。
import pandas as pd
from sklearn.linear_model import Ridge, RidgeCV
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import PolynomialFeatures
# 加载数据
data = pd.read_csv('./data/boston_housing.data', sep='\s+', header=None)
# 提取特征属性X和目标属性Y
X = data.iloc[:, :-1]
Y = data.iloc[:, -1]
# 将数据集划分为训练集和测试集
x_train, x_test, y_train, y_test = train_test_split(X, Y, test_size=0.33, random_state=10)
# 多项式特征扩展
poly = PolynomialFeatures(degree=2, interaction_only=True, include_bias=False)
x_train_poly = poly.fit_transform(x_train)
x_test_poly = poly.transform(x_test)
# 构建Ridge回归模型,设置正则化强度alpha
ridge = Ridge(alpha=100)
# 使用训练数据拟合模型
ridge.fit(x_train_poly, y_train)
# # 构建RidgeCV回归模型,使用交叉验证选择最佳alpha
# ridgeCV = RidgeCV(alphas=[0.001, 0.01, 0.1, 1.0, 10, 100, 1000, 10000, 100000, 1000000, 10000000], cv=10)
# # 使用训练数据拟合模型
# ridgeCV.fit(x_train_poly, y_train)
# 对测试集进行预测
y_test_hat = ridge.predict(x_test_poly)
# 对训练集进行预测
y_train_hat = ridge.predict(x_train_poly)
# 打印模型的系数和截距
print("Ridge Regression:")
print(f"系数: {ridge.coef_}")
print(f"截距: {ridge.intercept_}")
# 打印模型在训练集和测试集上的评分
print(f"训练集评分: {ridge.score(x_train_poly, y_train)}")
print(f"测试集评分: {ridge.score(x_test_poly, y_test)}")
ElasticNet回归
ElasticNet 回归(弹性网络回归)是一种结合了L1正则化和L2正则化的线性回归模型。它在模型训练过程中同时考虑L1和L2两种类型的正则化,从而兼具Lasso回归(L1正则化)的特征选择能力和岭回归(L2正则化)的参数缩减特性。
ElasticNet回归的损失函数可以定义为:
和 分别是L1和L2正则化的权重
ElasticNet 特别适用于那些特征数量远多于样本数量或特征之间存在较高共线性的情况。通过调整L1和L2正则化的比例,可以在特征选择和模型稳定性�之间找到一个好的平衡点,以达到更好的预测性能和模型的解释性。
import pandas as pd
from sklearn.linear_model import ElasticNet
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import PolynomialFeatures
# 加载数据
data = pd.read_csv('boston_housing.data', sep='\s+', header=None)
# 提取特征属性X和目标属性Y
X = data.iloc[:, :-1]
Y = data.iloc[:, -1]
# 将数据集划分为训练集和测试集
x_train, x_test, y_train, y_test = train_test_split(X, Y, test_size=0.33, random_state=10)
# 多项式特征扩展
poly = PolynomialFeatures(degree=2, interaction_only=True, include_bias=False)
x_train_poly = poly.fit_transform(x_train)
x_test_poly = poly.transform(x_test)
# 构建ElasticNet回归模型,设置正则化强度alpha和L1比率l1_ratio
elastic_net = ElasticNet(alpha=1.0, l1_ratio=0.5)
# 使用训练数据拟合模型
elastic_net.fit(x_train_poly, y_train)
# 对测试集进行预测
y_test_hat = elastic_net.predict(x_test_poly)
# 对训练集进行预测
y_train_hat = elastic_net.predict(x_train_poly)
# 打印模型的系数和截距
print("ElasticNet Regression:")
print(f"系数: {elastic_net.coef_}")
print(f"截距: {elastic_net.intercept_}")
# 打印模型在训练集和测试集上的评分
print(f"训练集评分: {elastic_net.score(x_train_poly, y_train)}")
print(f"测试集评分: {elastic_net.score(x_test_poly, y_test)}")
超参数和交叉验证
超参数(Hyperparameters)
超参数是在开始学习过程之前设置的参数,不同于模型训练过程中由数据自动学习的参数(如权重和偏置)。超参数直接控制了训练算法的行为和模型的性能。
常见的超参数包括:
- 学习率:在梯度下降等优化算法中,学习率决定了参数更新的步长
- 迭代次数:即模型训练过程中迭代的轮数
- 批大小(Batch size):在批量梯度下降中,批大小决定了每次更新参数时使用的样本数量
- 正则化参数:如L1或L2正则化中的λ
- 树的深度:在决策树和随机森林中,树的深度直接影响模型的复杂度
- 隐藏层数量和神经元数量:在神经网络中,这些参数决定了网络的结构和复杂度
交叉验证(Cross-validation)
交叉验证是一种统计方法,用于评估并比较机器学习模型的泛化能力。
交叉验证的主要类型:
-
k-折交叉验证(k-fold cross-validation):
- 数据集被划分为k个大小相等的子集
- 每次留出一个子集作为测试集,剩下的k-1个子集作为训练集
- 这个过程重复k次,每次选择不同的子集作为测试集
- 最终结果通常是这k次评估结果的平均值
- 10折交叉验证是最常用的
-
留一交叉验证(Leave-one-out cross-validation, LOOCV):
- 对于每一个样本,将该样本作为测试集,其余样本作为训练集
- 这种方法在数据集较小的情况下特别有用,但计算成本较高
-
随机划分交叉验证(Shuffle & Split):
- 数据集在每次迭代前被随机打乱,然后划分为训练集和测试集
- 这种方法可以多次重复,不固定划分方式
-
Holdout交叉验证:
- 划分训练集、验证集、测试集
- 暴力将所有可能的超参数在训练集上训练,得到多个模型
- 将所有模型在验证集上做评估,找出性能最佳的模型(即得到最佳的超参数)
- 用得到的超参数在训练集+验证集上训练,得到模型
- 用这个新模型在测试集上测试,得到性能评估数据
- 用确定的超参数在100%的数据集上重新训练,得到最终模型
参考文档:https://scikit-learn.org/stable/modules/linear_model.html